操作系统大作业
未完 待更新
前言
一旦到了学期末,看啥都是屎,尤其是浪费时间的大作业 想找个搭子一起做大作业,结果其中一个搭子也是屎,没办法只能自己一个人做了
这个大作业借鉴了一下两位的帖子
Java 实现 磁盘调度算法的实现与分析(计算机操作系统课程设计)—–扫描磁道移动路径可视化实现
不过我使用的语言是python+tkinter库,代码要相对简洁很多,而且增加了一点之前没有的功能,也不能称作完全抄袭罢
所有的代码我都放在我的GitHub repo上了,需要的可以去看看,如果对您有用的话别忘了给颗star
磁盘调度
先来先服务
1
2
3
4
5
6
7
8
9
10
def fcfs(self, requests, head):
"""
先来先服务算法 (FCFS)
"""
seek_sequence = [head] + requests
total_head_movement = sum(
abs(seek_sequence[i] - seek_sequence[i + 1])
for i in range(len(seek_sequence) - 1)
)
return seek_sequence, total_head_movement
代码很简单,就是按照顺序访问磁道位置,先到的先访问
graph LR
A[开始] --> B{获取磁盘请求队列}
B --> C{遍历请求队列}
C --> D{计算平均寻道长度}
D --> E[结束]
C --> F{获取当前请求磁道号}
F --> G{计算磁头移动距离}
G --> H{更新磁头位置}
H --> I{累加总移动距离}
I --> C
最短寻道时间优先
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
def sstf(self, requests, head):
"""
最短寻道时间优先算法 (SSTF)
"""
seek_sequence = [head]
total_head_movement = 0
remaining_requests = set(requests)
while remaining_requests:
current_head = seek_sequence[-1]
next_request = min(
remaining_requests, key=lambda req: abs(req - current_head)
)
seek_sequence.append(next_request)
total_head_movement += abs(next_request - current_head)
remaining_requests.remove(next_request)
return seek_sequence, total_head_movement
原理也没啥好说的,每次选择距离当前磁头位置最近的请求进行处理。
graph LR
A[开始] --> B{获取磁盘请求队列}
B --> C{循环直至所有请求处理完毕}
C --> D{遍历请求队列,找到距离磁头最近的请求}
D --> E{计算磁头移动距离}
E --> F{更新磁头位置}
F --> G{累加总移动距离}
G --> H{标记该请求已处理}
H --> C
C --> I{计算平均寻道长度}
I --> J[结束]
电梯调度算法 (SCAN)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
def scan(self, requests, head, direction="right"):
"""
电梯调度算法 (SCAN)
"""
seek_sequence = [head]
total_head_movement = 0
remaining_requests = set(requests)
visited = set()
current_track = head
while remaining_requests:
if direction == "right":
next_track = None
for track in sorted(remaining_requests):
if track > current_track and track not in visited:
next_track = track
break
if next_track is not None:
seek_sequence.append(next_track)
total_head_movement += abs(next_track - current_track)
current_track = next_track
visited.add(current_track)
remaining_requests.remove(current_track)
else:
seek_sequence.append(cylinder_count - 1)
total_head_movement += abs(cylinder_count - 1 - current_track)
current_track = cylinder_count - 1
direction = "left"
# 改变方向后,跳过已访问的磁道
while current_track in visited and current_track > 0:
current_track -= 1
else: # direction == "left"
next_track = None
for track in sorted(remaining_requests, reverse=True):
if track < current_track and track not in visited:
next_track = track
break
if next_track is not None:
seek_sequence.append(next_track)
total_head_movement += abs(next_track - current_track)
current_track = next_track
visited.add(current_track)
remaining_requests.remove(current_track)
else:
seek_sequence.append(0)
total_head_movement += abs(current_track - 0)
current_track = 0
direction = "right"
# 改变方向后,跳过已访问的磁道
while current_track in visited and current_track < cylinder_count - 1:
current_track += 1
return seek_sequence, total_head_movement
磁头在一个方向上移动,处理所有该方向上的请求,到达边界后反向移动。
graph LR
A[开始] --> B{初始化}
B --> C{判断 remaining_requests 是否为空}
C -- 否 --> D{查找下一个请求}
D -- 找到 --> E{处理请求}
E --> C
D -- 未找到 --> F{改变方向}
F --> C
C -- 是 --> G[结束]
循环扫描算法 (C-SCAN)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
def cscan(self, requests, head):
"""
循环扫描算法 (C-SCAN)
"""
seek_sequence = [head]
total_head_movement = 0
remaining_requests = sorted(requests)
# 向右移动到最右边
for req in remaining_requests:
if req >= head:
seek_sequence.append(req)
total_head_movement += abs(req - seek_sequence[-2])
# 从最左边开始继续向右移动
seek_sequence.append(cylinder_count - 1)
total_head_movement += abs(cylinder_count - 1 - seek_sequence[-2])
seek_sequence.append(0)
total_head_movement += abs(seek_sequence[-2])
for req in remaining_requests:
if req < head:
seek_sequence.append(req)
total_head_movement += abs(req - seek_sequence[-2])
return seek_sequence, total_head_movement
# 绘制结果图形
def draw_graph(self, sequence, total_distance):
self.canvas.delete("all")
# 绘制坐标轴
self.canvas.create_line(50, 350, 950, 350, width=2) # x轴
self.canvas.create_line(50, 350, 50, 50, width=2) # y轴
# 绘制刻度
for i in range(0, 221, 20):
x = 50 + i * 4
self.canvas.create_line(x, 350, x, 345, width=1)
self.canvas.create_text(x, 360, text=str(i), anchor="n")
# 绘制磁道序列和动画
head_x = 50 + self.start * 4
head_y = 350
head_oval = self.canvas.create_oval(head_x - 3, head_y - 3, head_x + 3, head_y + 3, fill="red", outline="red")
for i in range(len(sequence)):
x = 50 + sequence[i] * 4
y = 330 - i * 20
self.canvas.create_line(
x, y, x, y + 20, width=2, fill="blue"
)
self.canvas.create_text(
x, y - 10, text=str(sequence[i]), anchor="s"
)
# 移动磁头动画
self.canvas.move(head_oval, x - head_x, 0)
self.canvas.update()
time.sleep(0.5) # 暂停0.5秒
head_x = x
# 显示结果
avg_seek_length = total_distance / len(self.sequence)
result_text = (
f"磁道访问顺序: {sequence}\n"
f"总共移动磁道数:{total_distance}\n"
f"平均寻道长度: {avg_seek_length:.2f}"
)
self.result_label.config(text=result_text)
类似 SCAN 算法,但到达边界后不反转方向,而是直接回到起始端继续扫描。
graph LR
A[开始]
B{获取请求队列和初始磁头位置}
C{将请求队列按磁道号排序}
D[当前磁道号 >= 初始磁头位置?]
E{将请求添加到 seek_sequence}
F{更新磁头移动距离}
G{移动磁头到下一个请求}
H{将磁头移动到最右边磁道}
I{将磁头移动到最左边磁道}
J[是否还有未处理的请求?]
K{结束}
A --> B
B --> C
C --> D
D -- 是 --> E
E --> F
F --> G
G --> D
D -- 否 --> H
H --> I
I --> J
J -- 是 --> E
J -- 否 --> K
运行图片大致如下 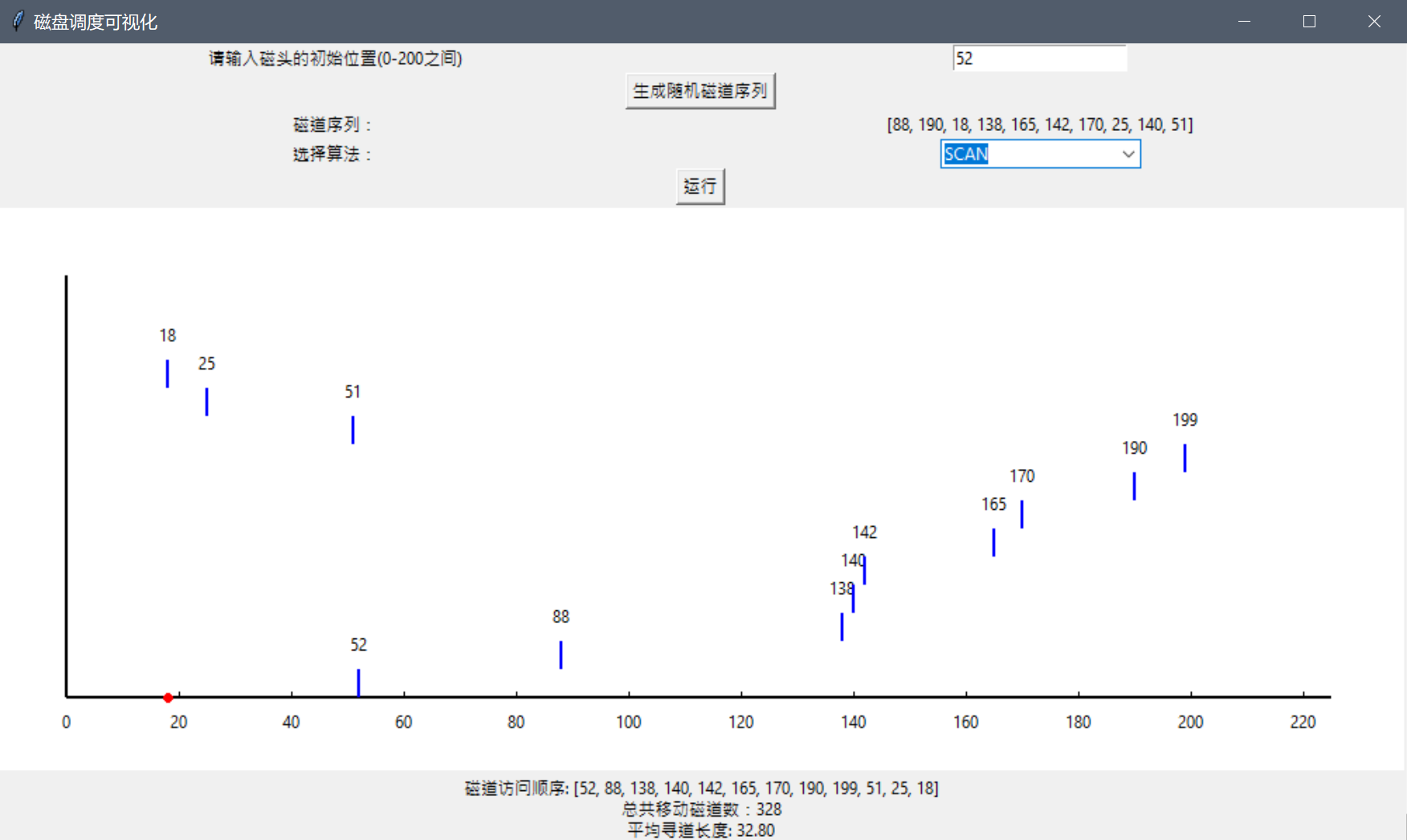
进程调度
没啥好说的 和之前磁盘调度都是差不多的道理
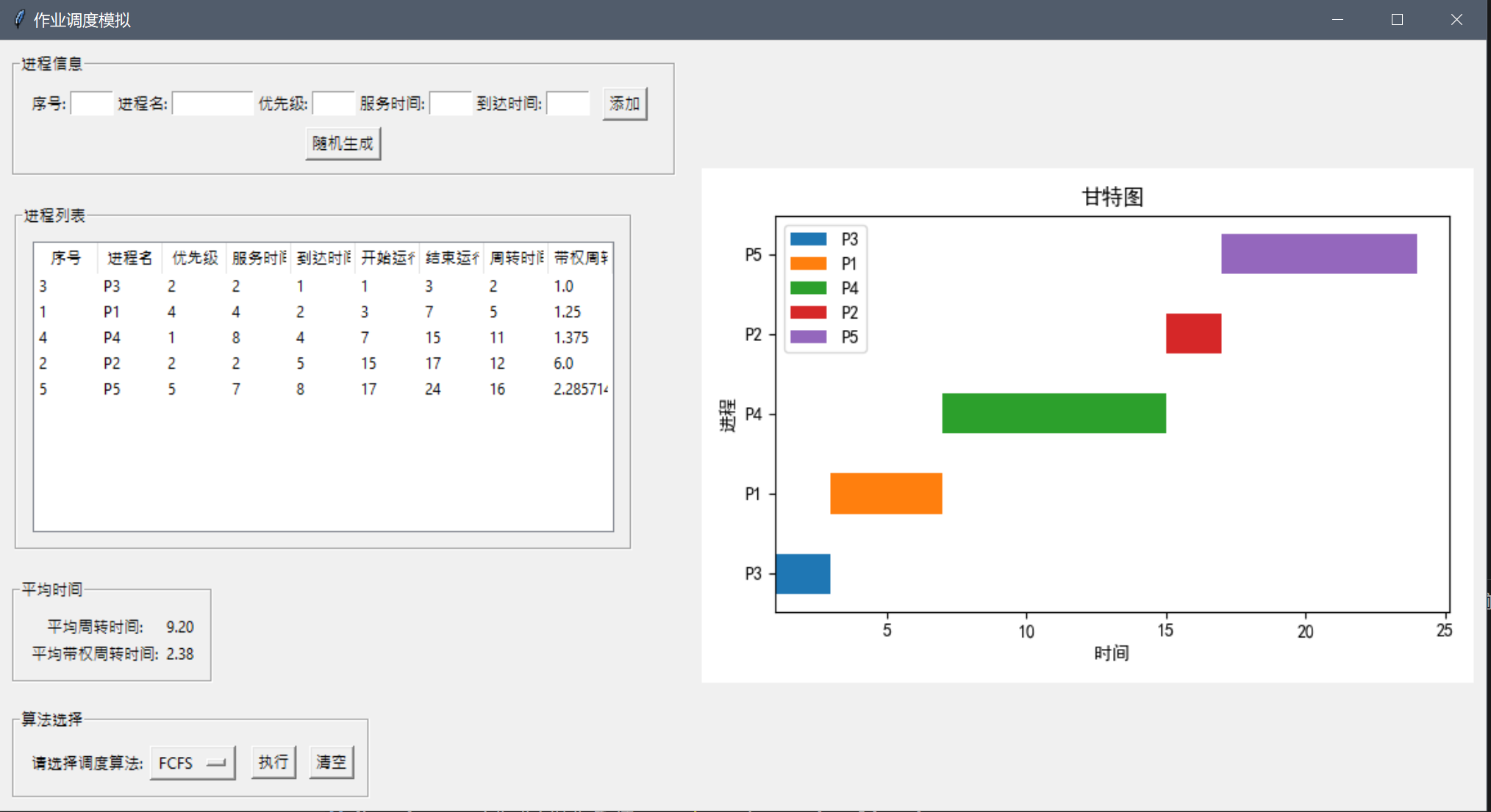
FCFS
1
2
3
4
5
6
7
8
9
10
11
def execute_fcfs(self):
# 按照到达时间排序
self.processes.sort(key=lambda x: x.arrive_time)
# 计算每个进程的开始时间、结束时间、周转时间和带权周转时间
current_time = 0
for pcb in self.processes:
pcb.begin_time = max(current_time, pcb.arrive_time)
pcb.finish_time = pcb.begin_time + pcb.work_time
pcb.tat = pcb.finish_time - pcb.arrive_time
pcb.wtat = pcb.tat / pcb.work_time
current_time = pcb.finish_time
SJF
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
def execute_sjf(self):
# 按照到达时间排序
self.processes.sort(key=lambda x: x.arrive_time)
# 创建一个列表来存储已经完成的进程
completed_processes = []
# 初始化当前时间和就绪队列
current_time = 0
ready_queue = []
# 循环执行,直到所有进程都完成
while len(completed_processes) < len(self.processes):
# 将到达时间小于等于当前时间的进程添加到就绪队列中
for pcb in self.processes:
if pcb.arrive_time <= current_time and pcb not in ready_queue and pcb not in completed_processes:
ready_queue.append(pcb)
# 按照服务时间对就绪队列进行排序
ready_queue.sort(key=lambda x: x.work_time)
# 如果就绪队列不为空,则选择服务时间最短的进程执行
if ready_queue:
# 获取就绪队列中的第一个进程
pcb = ready_queue.pop(0)
# 计算进程的开始时间、结束时间、周转时间和带权周转时间
pcb.begin_time = current_time
pcb.finish_time = pcb.begin_time + pcb.work_time
pcb.tat = pcb.finish_time - pcb.arrive_time
pcb.wtat = pcb.tat / pcb.work_time
# 更新当前时间
current_time = pcb.finish_time
# 将进程添加到已完成进程列表中
completed_processes.append(pcb)
else:
# 如果就绪队列为空,则将当前时间更新为下一个进程的到达时间
next_arrive_time = min([pcb.arrive_time for pcb in self.processes if pcb not in completed_processes])
current_time = next_arrive_time
HRN
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
def execute_hrn(self):
# 按照到达时间排序
self.processes.sort(key=lambda x: x.arrive_time)
# 创建一个列表来存储已经完成的进程
completed_processes = []
# 初始化当前时间和就绪队列
current_time = 0
ready_queue = []
# 循环执行,直到所有进程都完成
while len(completed_processes) < len(self.processes):
# 将到达时间小于等于当前时间的进程添加到就绪队列中
for pcb in self.processes:
if pcb.arrive_time <= current_time and pcb not in ready_queue and pcb not in completed_processes:
ready_queue.append(pcb)
# 按照响应比对就绪队列进行排序
ready_queue.sort(key=lambda x: ((current_time - x.arrive_time) + x.work_time) / x.work_time, reverse=True)
# 如果就绪队列不为空,则选择响应比最高的进程执行
if ready_queue:
# 获取就绪队列中的第一个进程
pcb = ready_queue.pop(0)
# 计算进程的开始时间、结束时间、周转时间和带权周转时间
pcb.begin_time = current_time
pcb.finish_time = pcb.begin_time + pcb.work_time
pcb.tat = pcb.finish_time - pcb.arrive_time
pcb.wtat = pcb.tat / pcb.work_time
# 更新当前时间
current_time = pcb.finish_time
# 将进程添加到已完成进程列表中
completed_processes.append(pcb)
else:
# 如果就绪队列为空,则将当前时间更新为下一个进程的到达时间
next_arrive_time = min([pcb.arrive_time for pcb in self.processes if pcb not in completed_processes])
current_time = next_arrive_time
软件运行结果大致如下
时间片轮转
这个本来应该算在进程调度里面,作为一个子算法出现的,但是嗯是给单独提出来了,说明时间片轮转算法的重要性了(虽然但是,LINUX操作系统用的可不是RR算法,而是用的CFS完全公平调度器,具体的自己去查 了解一下)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
def round_robin(processes, time_quantum):
ready_queue = []
time = 0
finished_processes = []
print("时间片轮转调度算法演示:")
while processes or ready_queue:
# 将到达的进程添加到就绪队列
for p in processes:
if p.arrival_time <= time:
ready_queue.append(p)
processes.remove(p)
if ready_queue:
current_process = ready_queue.pop(0)
print(f"时间: {time} 进程 {current_process.pid} 正在运行...")
# 执行一个时间片
execution_time = min(current_process.remaining_time, time_quantum)
current_process.remaining_time -= execution_time
time += execution_time
if current_process.remaining_time == 0:
# 进程完成
current_process.turnaround_time = time - current_process.arrival_time
current_process.waiting_time = current_process.turnaround_time - current_process.burst_time
finished_processes.append(current_process)
print(f"时间: {time} 进程 {current_process.pid} 完成.")
else:
# 进程未完成,放回就绪队列末尾
ready_queue.append(current_process)
else:
# CPU 空闲
time += 1
return finished_processes
简单描述就是给每个进程分配一个固定的时间片(Time Quantum),进程在时间片内占用 CPU 执行任务。当时间片用完后,即使进程还没执行完毕,也会被系统强制挂起,CPU 会被分配给队列中的下一个进程。
流程图大致描述如下
graph LR
A[进程到达] --> B{加入就绪队列}
B --> C{分配CPU时间片}
C --> D{进程执行}
D -- 时间片内执行完毕 --> E[进程结束]
D -- 时间片耗尽 --> F{进程中断}
F --> G{返回就绪队列队尾}
G --> C
其实这个算法实现起来很简单,跑的时候也没用tkinter库了,直接就纯控制台输出+matplotlib甘特图输出,因为实在没时间做了
说实话做的并不算太好:( 但是确实没时间了 我还得复习其他的科目 不能把时间都浪费在这上面 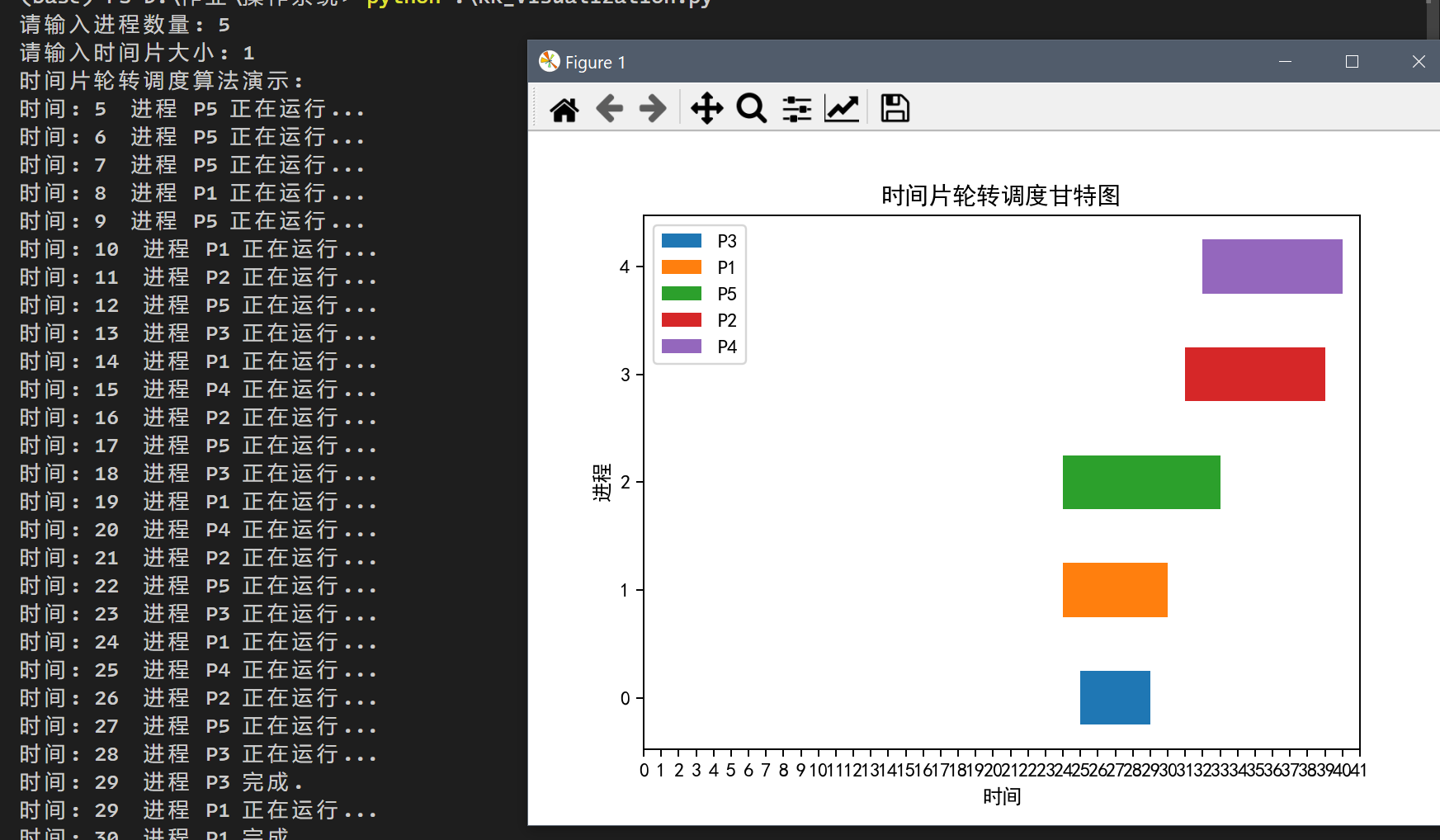
结束了?
TBC
本文由作者按照 CC BY 4.0 进行授权